从产品体验和设计思路看,我更愿意叫Reno4是真正的Reno4,而Reno4Pro叫Reno3 Ultra更合适一点。如果没耐心看这篇文字,只关心配置的话,我简单点总结:
1. Reno4 Pro就是基于Reno3 pro的总体设计,加入了新的配色和AG工艺,升级到FindX2标准版的影像系统和65W充电系统的版本。
2. Reno4则是全面修正Reno3外观的和感知的错误,相对Pro做了一些必要的简配的产物。它和Pro之间的差距不像前代那么巨大,表现也更加稳健。
如果你想听我说点不一样的,那就从Reno3Pro的作用和Reno4Pro的传承开始聊。后面我会简单谈谈实际的产品体验。
承前启后的Reno4Pro
在Reno3 Pro之前,很多厂商都想把手机搞的轻薄一点。这两天,我听说有个大厂的老板,因为2019年全年的产品都是板砖形的,把产品经理骂了个遍,今年新品全面回归轻薄。而最近发布的主力产品,超过一半的机型选择了轻薄路线。但轻薄总是有代价的,SOC、影像模组、电池不可能之三角悖论。
Reno3Pro的出现,让几乎所有的厂商开始考虑,能不能挑战这个不可能三角,解决不了也没关系,尽可能提高这三大因素的底线行不行?比如三星不就做到了轻薄和性能体验共存嘛。于是乎,我们今年看到了对Nova6系列设计推翻重来的Nova7和荣耀30系列;看到了OPPO的Reno4系列;也看到了后续vivo的X50系列。
整个产业的殊途同归,是对去年板砖流的一次集体反思,而大家选择不太拉胯的组件构建新的轻薄流产品,则是对今年消费趋向的引导。
从这个意义上来说,Reno4系列,是对Reno3系列不足的补全,也是对主流性能下轻薄的探索的一次继承。在Reno3Pro的基础上,弥补了不少遗憾(尽管SoC的性能还是原地踏步)。
Reno4系列是一款线下机,线下机的基本逻辑还是卖相、品牌、服务和价格体系的综合效果。今年的市场挑战很大,Reno4作为一个查漏补缺,但略微缺乏大改进的的产品型号,是否在线下能靠颜值、屏幕、快充和防抖视频这些卖点取得实战效果,还得交给市场验证。
Reno4 Pro实际体验:Reno3Pro的Ultra版,FindX2的Value版

上图是Reno4Pro、Reno3Pro和FindX2的合影。FindX2玻璃版是8mm的厚度,7.6mm的Reno4Pro依然能感觉到厚度上的细微落差。镜头模组的外观设计方面,继承了OPPO家垂直纵置的大体设计,配色有了巨大的调整。从Reno3Pro的黑色色块调整为三枚镜头独立放置,配以半透明的接近后盖色的玻璃基板。这么做的始祖是苹果,曾被机圈耻笑为:凸起再凸起。凸起再凸起不过只是视觉上的感觉,实际尺寸并没有凸起再凸起。

配置方面,我开头就说了,整体和Reno3Pro基本一样,而影像模组完全继承了FindX2那套,超广角采用的是一颗16:9比例的CMOS,索尼IMX708,1/2.4英寸,比1/2英寸的IMX586小一点,但是比日常使用的1/2.8英寸IMX350要大。原生直接输出16:9规格的1200万像素照片,最大光圈为F2.2。主摄镜头为打磨了一年多的OISIMX586 F1.7,这颗主摄的表现我拍过很多样张,个人非常满意。2X长焦镜为1300万像素CMOS,结合主摄进行5X的混合计算成像。之前FindX2系列评测,我谈IMX689和IMX586比较多,今天这篇文章,主要会展示一下IMX708的性能。
在性能指标上,Reno4Pro和Reno4最大的亮点就是标配了65W的SuperVooc 2.0闪充,4000毫安时电池,极耳前置方案,36分钟即可充满。这是OPPO首次把自家目前最强的充电技术放到线下主力产品上。
SoC和基带指标,依然使用骁龙765G芯片,内置X52 5G基带。这款芯片的性能和基带能力都谈不上上乘,但是ISP的表现相对比较稳健,尽管AI测试成绩不是太高,但满足这套模组的需求还是足够了。Reno3Pro已经证明了它那套影像系统在765G上是可以玩转的。
简单小结一下,Reno4标准版相对Reno3是天翻地覆的变化,起码不会搞个塑料中框和水滴屏了;Reno4Pro则是Value版本的FindX2,差别主要在于采用COP封装的90Hz的FHD+三星柔性AMOLED屏幕和骁龙765G芯片。那么,一个好玩的问题来了,如果Reno4 Pro采用骁龙865芯片组,你会选择Reno4Pro还是FindX2呢?
影像系统简评:令人信服的色准表现,和FindX2如出一辙
如果你对FindX2的影像系统心里有数的话,那这部分基本可以跳过。如果你手上有Reno3Pro,那我建议你关注这部分关于超广角的成像质量,其他基本一模一样,没有什么区别。影像系统简评使用的参考手机是FindX2 Pro(IMX689主摄、IMX586超广角)和FindX2标准版(Reno4Pro同款模组)。
在主摄色彩对比上,我会用Reno4Pro和两款FindX2去比;在成像细节上,主要用Reno4Pro和FindX2Pro去比,看看差距和差别在哪里。
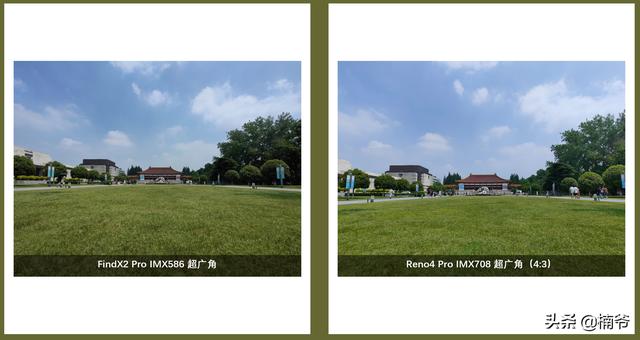
需要说明的是,IMX708本身是一颗16:9画幅的CMOS,如果按照4:3出片的话,机身会裁成约900万像素的照片。而IMX586的4:3画幅是1200万像素(1.6μm)。从实际表现来看,FindX2Pro的整体色彩偏素(后面对室内文物基色的表现也基本证明这一点),而Reno4Pro(也包括FindX2)的整体调校则积极一些。这两者在白平衡和色温上的主要硬件区别在于FindX2Pro有一颗色温传感器且,理论上FindX2Pro的判断更值得信任一点。实拍下来,如果以肉眼为主要标准来看,FindX2Pro在绿色的的反馈略微保守,而Reno4Pro则比较积极。
在关键的解析力看,100%细节放大我并没有发现两者存在肉眼轻易可以辨认的差距,也就是说IMX708的解析力在IMX586面前并不示弱。目前超广角选型里,IMX586、IMX608的4000万像素级为第一层级,那么IMX708当之无愧可以成为第一梯队略往下一点的水准,好于主流的IMX350。

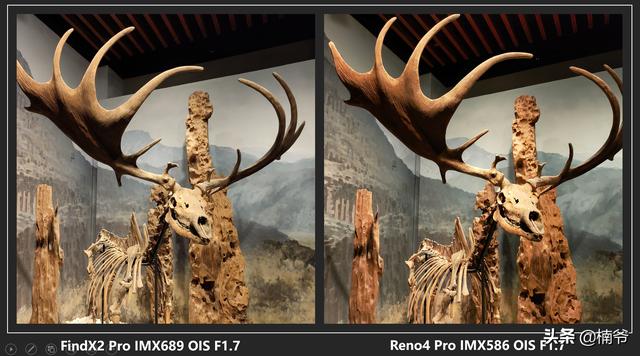
Reno4Pro、FindX2和FindX2Pro在室内射灯的干扰下,都可以消除LED灯的频闪干扰,对色彩做出各自的判断。这三张图,最符合原貌的其实是FindX2的色彩表现,准确到让我惊讶。而FindX2Pro则素雅一些,而Reno4Pro活泼一些。至于讨喜度,见仁见智,毕竟还原是客观的,喜爱是主观的。
FindX2 Pro的5X成像有两种模式,在一定对焦距离内,会使用IMX689强行裁切,也就是所谓的长焦微距模式。Reno4Pro则使用主摄和2X中焦镜进行长焦微距的混合成像。之前我对IMX689的评价是2X裁切还不错,强行裁切5X可能有点勉为其难。在这组样张里,这俩照片都没如实反馈当场的颜色,IMX689依然是色温纠正,偏淡;Reno4Pro则偏浓郁一点。关键的成像细节,Reno4Pro的5X混合,在暗光下拍摄的细节要好于IMX689强行裁切。
静态影像部分,我的总结如下:
1. Reno4Pro能提供一个目前一流水准的16:9规格的超广角模组,和IMX586直接PK不落下风。
2. 相对FindX2Pro,Reno4Pro缺失了独立的色温传感器,保留了激光对焦系统。室内拍摄,Reno4Pro不像其他竞品那样出现各种奇奇怪怪的色温偏移,反而是尽可能的还原了本质。而它的大哥FindX2Pro则积极调整白平衡,使之看上去更自然。
3. 其他部分,比如潜望镜5X对比混合变焦的5X,大太阳底下色彩表现差异不大,细节上还是潜望镜略好点。暗光下FindX2Pro对潜望镜做了一定的优化,比混合变焦无论在对焦速度,还是成像清晰度都要强一些。
4. Reno4Pro和同模组的FindX2在色彩表现并不完全一致,就我个人来说,当前更喜欢FindX2的调校策略。当然这俩调成完全一模一样是没有问题的,就看OPPO怎么想了。
总结一下:
从产品力来说,Reno4Pro在轻薄的机身下提供了一个性能削减,其他部分类似FindX2的解决方案,配合新的机身工艺和65W充电,去承担接下来一段时间OPPO线下主力销售的任务。
这个任务一点都不轻松,同期竞品太多,各种花里胡哨的功能和玩法,都会让Reno4系列面临巨大的挑战。实际体验看,Reno4Pro属于没什么毛病的那种,你要非抬杠说完全没创新也没啥,毕竟其他厂也都在各种换壳技术下放什么的,对吧。
产品,我很喜欢;销量,交给消费者拿钱投票去吧。