Mxenes可拉伸电子皮肤,为软外骨骼及机器人提供无线应变触觉传感器
新兴的软外骨骼迫切需要具有可调线性工作窗口的高性能应变传感器,以实现高精度的控制回路。尽管如此,最新的应变传感器仍需要进一步发展,以同时满足多个传感参数,包括高灵敏度,可靠的线性度和可调应变范围。此外,迫切需要一种无线传感系统来实现对软外骨骼的实时便捷监测,但是很少进行研究。
在此,无线Ti 3 C 2 T xMXene应变传感系统是通过在压阻层上开发分层形态并将调制电阻集成到电路设计中,以及将传感电路与近场通信(NFC)技术集成在一起而制造的。无线MXene传感器系统可同时实现超高灵敏度(仪表系数≥14,000)和可靠的线性度(R 2在多个用户指定的高应变工作窗口(130%至≥900%)内的≈≈0.99)。此外,无线传感系统可以通过单个数据库通道共同监视多段外骨骼的动作,从而大大减少了数据处理的负担。最后,我们将无线,无电池的MXene电子皮肤与各种软外骨骼相集成,以监控有助于手/腿康复的复杂动作。
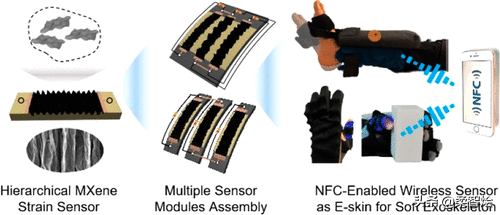
由新加坡国立大学(NUS)组成的研究团队在陈宝仁教授的带领下开发的新型应变传感器采用 称为MXenes的柔性,可拉伸和导电纳米材料制成,具有超薄,无电池的特点,并且可以无线传输数据。具有这些期望的特性,新颖的应变传感器可以潜在地用于广泛的应用。与现有技术相比,在测量微小动量时灵敏度高10倍。
来自新加坡国立大学化学与生物分子工程系的陈教授助理解释说:”传统应变传感器的性能一直受到所用传感材料的性质的限制,并且用户针对特定应用定制传感器的选择有限。在这项工作中,我们开发了一种控制MXenes表面纹理的简便策略,这使我们能够控制应变传感器对各种软外骨骼的传感性能。这项工作中开发的传感器设计原理将大大提高电子皮肤和软机器人的性能。”

这些轻型应变传感器的灵敏度是传统技术的十倍,可以安装到康复手套中,以提高其灵敏度和性能。
精密制造
可以很好地使用新型应变传感器的领域之一是精密制造,其中机械臂用于执行复杂的任务,例如制造易碎产品(如微芯片)。
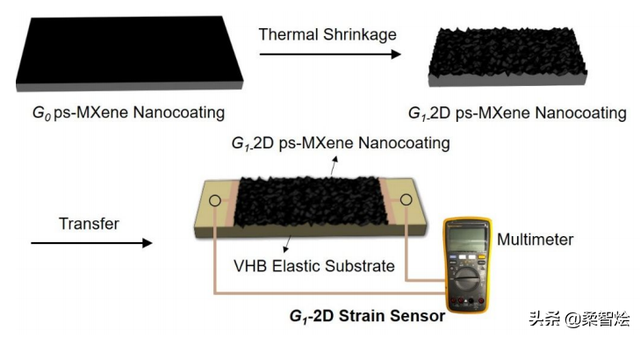
G1-2D传感器的研制。制备了G1-2dps-MXene纳米涂层收缩膜热驱动过程中的表面不稳定性控制。然后将变形的ps-MXene纳米涂层转移到VHB基底上。
由NUS研究人员开发的这些应变传感器可以涂在像电子皮肤一样的机械手臂上,以测量拉伸时的细微运动。当沿着机械臂的关节放置时,这些应变传感器可使系统精确地了解机械臂在移动多少以及它们相对于静止状态的当前位置。当前的现成应变传感器没有执行该功能所需的精度和灵敏度。
精密制造中使用的常规自动机械臂需要从不同角度对准它们的外部摄像头,以帮助跟踪其定位和运动。NUS团队开发的超灵敏应变传感器将通过提供精确动作的自动反馈(误差范围小于1度)来帮助改善机械臂的整体安全性,并且无需外部摄像头,因为它们可以跟踪定位和运动,而无需任何视觉输入。
“对于Realtek新加坡公司,很高兴能与Chen Po-Yen助理教授及其在NUS的团队合作开发适用于软机器人和工业机器人手臂的无线传感器模块。我们与客户共同开发的具有传感器指定传感性能的无线传感器使机器人能够进行高精度运动,并且反馈传感数据可以无线传输,这与Realtek Singapore在无线智能工厂中的方法相结合。Realtek将继续与NUS建立牢固的合作关系,我们期待将这些技术从实验室推向市场。” Realtek新加坡董事长Yeh Po-Leh博士说。
可定制的超灵敏传感器
技术突破是生产工艺的发展,这使NUS研究人员可以在宽信噪比高的工作范围内创建高度可定制的超灵敏传感器。
传感器的工作窗口确定了它可以伸展的程度,同时仍保持其传感质量,并且具有高信噪比意味着更高的精度,因为传感器可以区分机械臂的细微振动和微小运动。
通过这种生产过程,团队可以将传感器定制为0%到900%之间的任何工作窗口,同时保持高灵敏度和信噪比。标准传感器通常可以达到100%的范围。通过将具有不同工作窗口的多个传感器组合在一起,NUS研究人员可以创建单个超敏感传感器,否则该传感器将无法实现。
研究团队花了两年的时间开发出这一突破,并在ACS Nano科学期刊上发表了他们的工作(”具有超高灵敏度的软Ti 3 C 2 T x MXene应变传感器和指定用于软骨骼的工作窗口”)。他们还拥有在软机器人康复手套中使用软骨骼的工作原型。
这些先进的柔性传感器使我们的柔软可穿戴机器人具有重要的能力,可以感知患者的运动表现,尤其是在运动范围方面。这将最终使软机器人更好地了解患者的能力,并为他们的手部动作提供必要的帮助。”国大生物医学工程系软机器人实验室负责人Raye Yeow副教授说。国家机器人技术研发计划办公室下的计划。
机器人手术
该团队还希望提高传感器的功能,并与新加坡综合医院合作,探索其在软外骨骼机器人中的应用以及在经口机器人手术中的手术机器人中的应用。
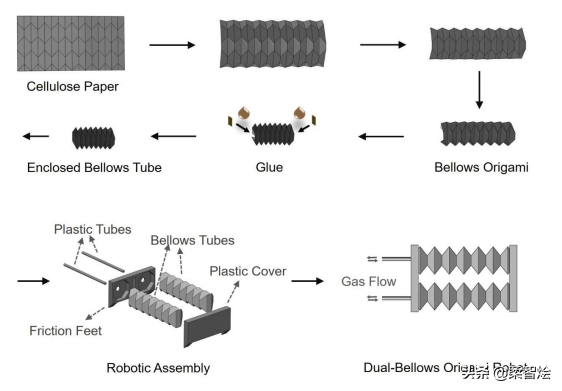
气动双波纹管折纸机器人的制造工艺。

软腿外骨骼的制作工艺。

软手外骨骼的制作工艺。
“作为外科医生,我们不仅依靠我们的视线,还依靠我们的触觉来感觉到我们进行手术的身体内部区域。例如,癌变组织感觉与正常健康组织不同。通过在超长的机器人工具中添加超薄无线传感模块,我们可以在手无法触及的区域进行操作,而无需进行开放式手术就可以”感觉”到组织的刚度。”高级Lim Chwee Ming博士说新加坡总医院耳鼻咽喉头颈外科顾问。